Wipe Dropper Walker
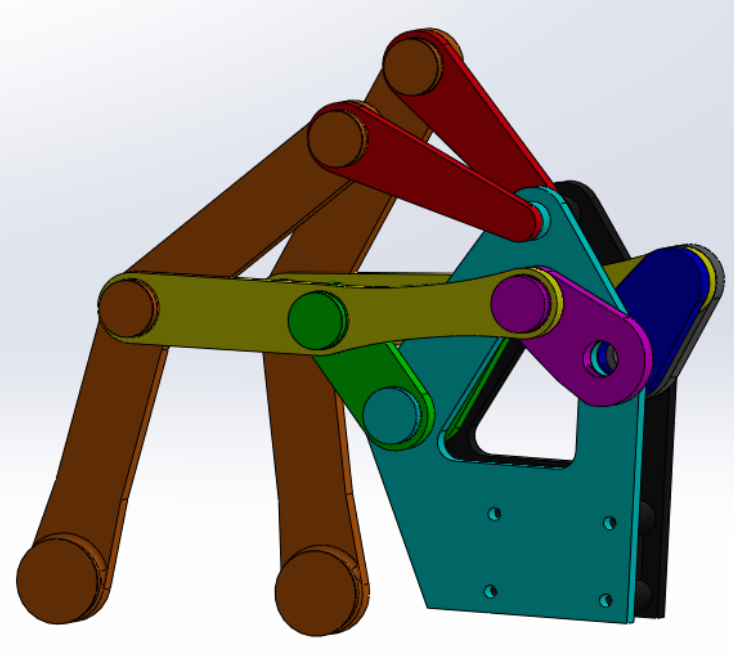
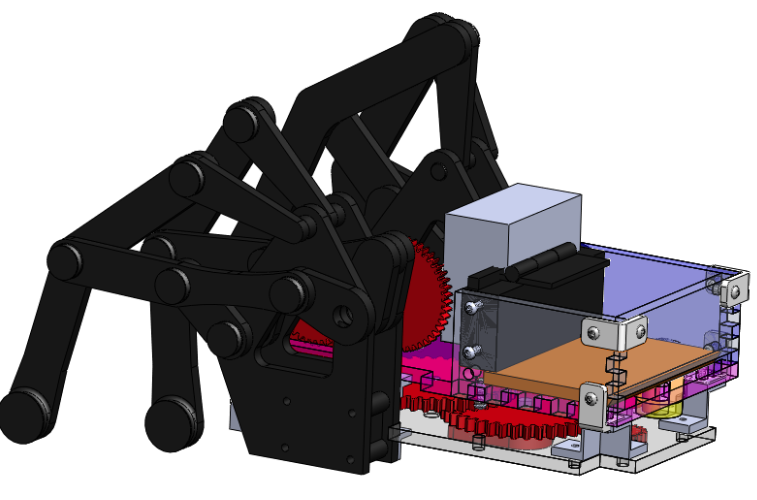
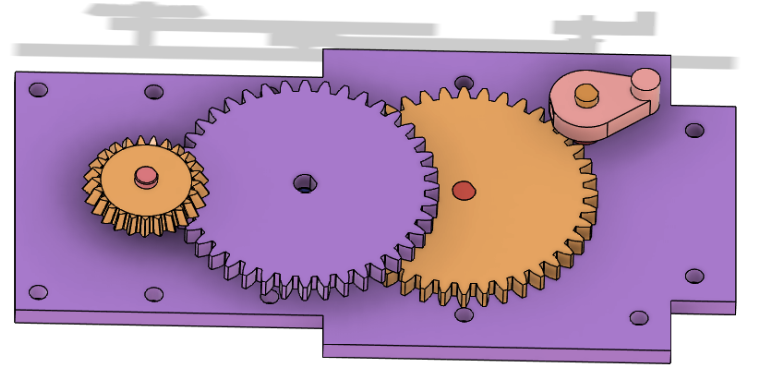
I’m developing a wipe dropping walking robot that combines Klann mechanical legs with a Whitworth quick return mechanism to dispense cleaning wipes in timed intervals as it walks. The walker uses offset Klann linkages to create a stable gait, which are driven through a compact gear train and sector gear that convert continuous motor rotation into smooth forward motion. A Whitworth quick-return linkage at the end of the train converts that rotation into a push stroke on the dispenser, so wipes are released reliably while minimizing wasted motion and motor load. The full system was designed around manufacturability, budget constraints, and human centered use, with multiple design reviews and user tests influencing the final geometry and mechanism choices.
Miniature Jet Engine

I’m designing and building a small turbojet engine based on a repurposed automotive turbocharger. I’ll be manufacturing a custom diffuser, combustion chamber, fuel lines, and stator sized around the geometry of the compressor and turbine blades. Using Brayton cycle analysis I built a Python script to calculate pressures, temperatures, velocities, and mass flow rate at each section of the engine, to match compressor and turbine performance, and to set key dimensions like blade heights, combustor volume, and exhaust nozzle area. After finishing each part's manufacturing I plan to assemble, test, and install the engine on a small custom VTOL drone.